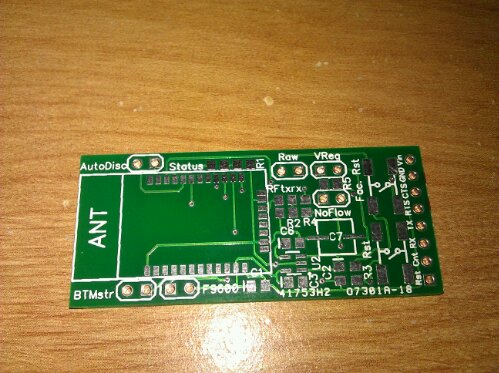
I got that RN-42 carrier board populated and working! Its ready for the GyroSkirt driver board, once I get that built.
There are a few errors on the board. TX and RX are swapped somewhere. Either on this board or on my USB to TTL-Serial board or in the RN-42 documentation. Also it seems the LEDs were meant to go to Vcc rather than ground. As a result my LED indication for connection status and RF traffic is inverted.
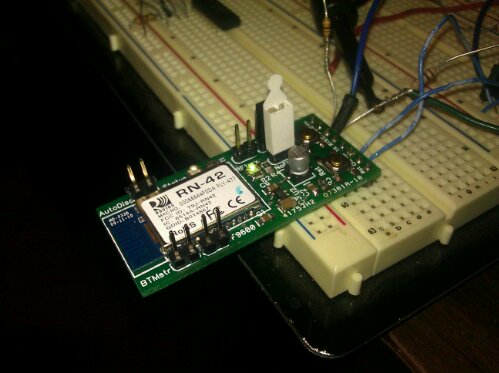
I can live with the errors as the actual data transmission works like a champ. To test the tranmission I hooked the carrier board up to a PC via a USB to TTL serial converter configured to operate at 3.3V. The venerable Hyperterminal program was used to open the virtual com port on the PC. Then I downloaded Sena’s Bluetooth terminal program to my Android phone and used it to form a Bluetooth serial connection between my phone and the modem. The result: keys pressed on my phone’s keyboard appeared inside the Hyperterminal running on the PC and keys pressed on the PC keyboard appear inside the Sena Bluetooth terminal running on my phone. Bi-directional data flow at 115,200 baud.
Now that I have proven my wireless link works, I need to update the GyroSkirt/GryoBelt firmware to allow me to adjust the gain and the deadband over the Arduino’s serial port. (In addition to actually making a driver board that has a spot for the modem.)