The first update can be found here.
The dynamic sculpture is affectionately called “Douglas” till we come up with a better name. Lance, Chris, and I have been working on different pieces of the project concurrently.
Chris has been designing the slave controller PCB. Each PCB will have a PIC micro controller, which will drive (2) stepper motor through a ULN2803 chip. The PIC controllers will communicate to a chipKIT™ WiFire over SPI. The WiFire has built in SD Card and WiFi. Since Douglas will be hung in an atrium, this allows us to send new animations wirelessly to a SD Card.
Lance has been working on the PIC firmware and the communication protocol. The firmware interprets the “G-Code” like commands and drives each stepper at the specified acceleration and velocity.
I have been designing the motor mount and frame in Inventor. A few pics below.
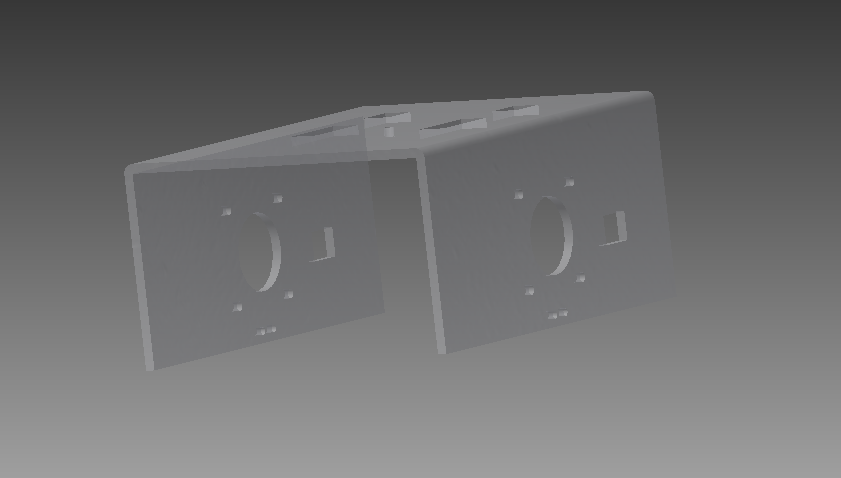

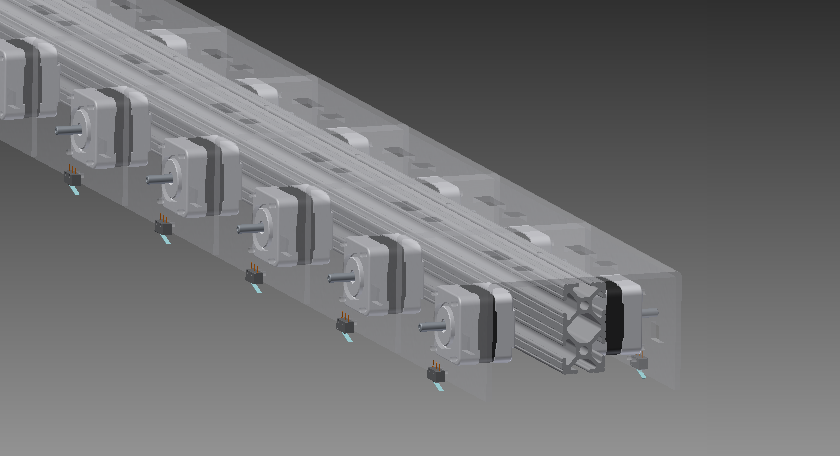
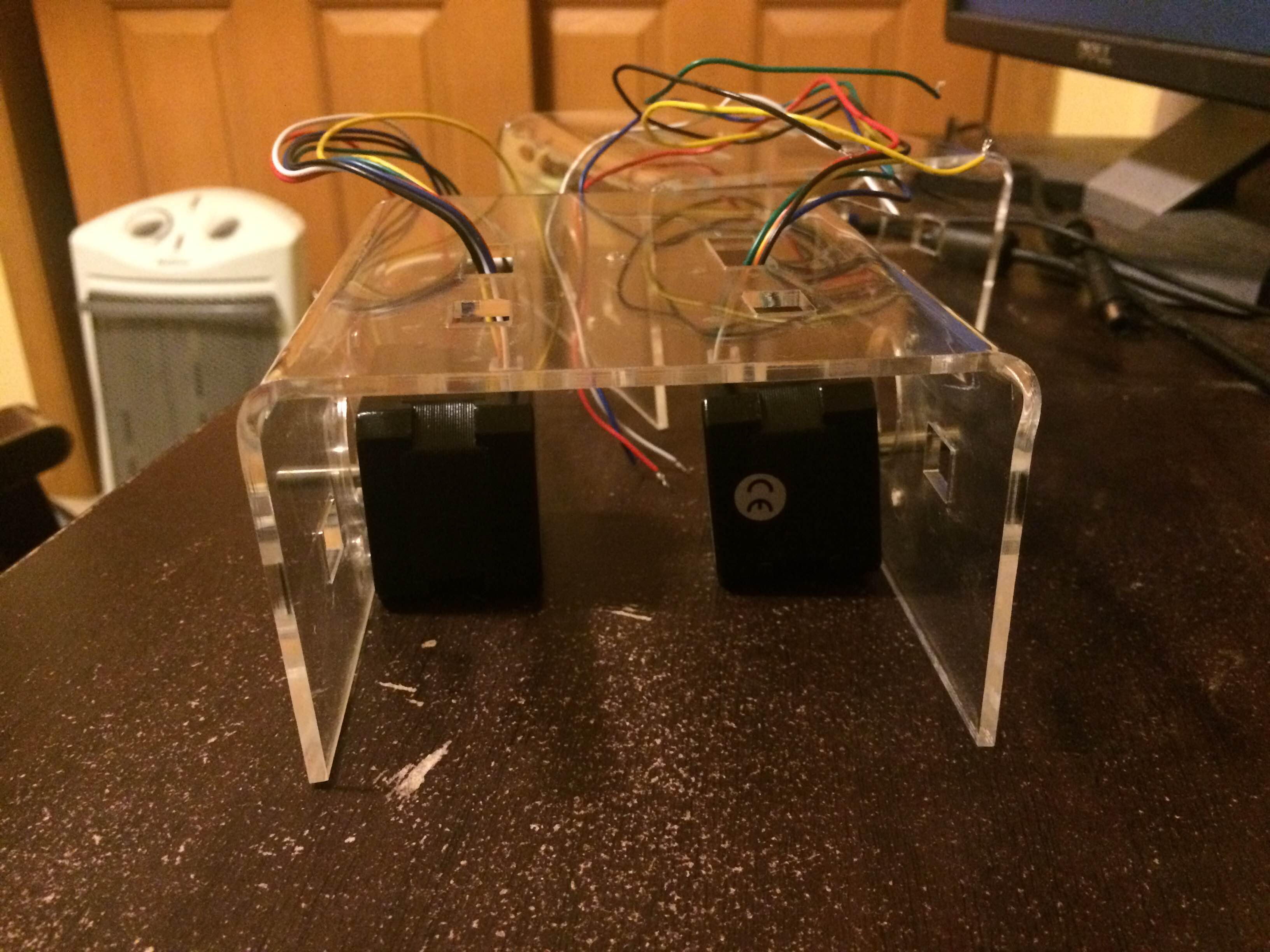
The bent acrylic mount will be mounted on aluminum extrusions. The limit switch has been integrated into the mount as well. I built the first prototype a couple of days ago.
Next, I will create a bending jig to replicate the mount accurately. Additionally, we will be doing some measurements to figure out power consumption. Currently, it looks like we will need two dedicated 120V, 20 amps circuits. We would like to do some real world combined power consumption tests to see if we can lower that requirement.