Ben Nelson may be just a little bit obsessed with electric vehicles. Over the years he’s built an electric car and electric motorcycle, and he’s even got an electric riding lawnmower. He wanted to show the power of electric vehicles, so he decided to have his own “DIY Road Rally” and ride his Vetrix all the way around Lake Michigan.
All the way around the lake!? That’s 1,000 miles with no gasoline. He’ll be charging up a lot, but he knows where, when, and how to charge up.
People often say that electric vehicles are only good for short trips around the city, but Ben aims to prove them wrong. He’s also planning a full-length documentary film about his adventure…
When I recently was at the thrift store and saw a pair of ice skates next to a kick-scooter, it got my mind going. “What would a scooter look like with skates in place of wheels!?”
The next time I was at the Makerspace, I saw my old electric scooter over on the Hack Rack. This was a scooter I originally rescued from a dumpster. Although it didn’t have batteries, just adding power and a little tinkering got it up and running again. A few of the EV Club and PowerWheels Racing guys played around with the scooter a bit, but eventually the controller got toasted, and who knows what happened to the front wheel.
Oh well, I’d be replacing that front wheel with an ice skate anyways.
Turns out that the heel of an ice skate is actually sturdy enough to drill right through and use as a mounting point. I simply drilled through the skate, inserted a spacer, and then ran a 3/8″ bolt through the skate and the front fork of the scooter. I finished it off with a couple of washers and a nut.
Then next thing to fix was to get the motor going again. Turns out that it’s a brushless motor. While I have a fair amount of experience now with BRUSHED motors, this was my first experience with brushless. I did a little research, and then ordered a 24V, 250 watt generic brushless controller from a mail-order scooter parts company. Unfortunately, it used a different style of throttle than what was already on the scooter, so I had to order a throttle to match.
Connecting the controller was pretty easy, three wires to the motor and the black and red one to power. I first bench-tested it with an old printer power supply, and once everything was working right, bit the bullet and bought a brand new pair of 12ah SLA batteries. The two batteries are wired in series, along with a 20 amp fuse, and then go to the controller.
I still needed a deck for the scooter. I dug through some scrap materials and found a pair of cabinet doors that were about the right size. I cut them down just a bit and bolted them to the scooter. I even re-mounted a cabinet door handle to have as an attachment point for towing a sled.
With that, I was ready to go for a test ride, so it was off to the lake. Once I was on the ice, I turned on the scooter and gave it a go! What fun! It really zipped along, but it was almost impossible to steer, as the back tire would slip right out from under me! Time for more traction!
I decided to make a spiked tire. I removed the rear wheel, then disassembled the two-part rim and removed the tire and inner tube. I stuck 1/2″ self-tapping, pan-head, sheet-metal screws through the tire from the inside, so that their points stuck out. I evenly spaced out 24 screws and alternated them to be slightly off-center side to side. Next, I put some old scrap bicycle inner tube over them as a liner to protect the scooter tire inner-tube. After that, it was just a matter of reassembling everything.
Now for test #2 out on the ice. Remembering how much it hurt to fall on the ice, I was prepared this time by wearing my motorcycle jacket (which has padding built-in) and my helmet. Good thing too, as I would learn while steering with one hand and holding a GoPro camera in the other…. (Note to self, keep both hands on handlebars at all times.)
Overall, the Ice Scooter works great! I still have a few little things to do on it. For example, the motor is running “sensor less”, and I’d like to learn about how brushless motors use the sensor system. I’d also like to get a small 24V dedicated charger. As it is right now, I have to remove the deck and manually charge with a little 12V charger.
From thrift store idea, to hack rack, to life on the ice, it’s always fun to see what you can do with just a little ingenuity. I hope you like this project. If you want to see more on it, please check out the write-up I did on Instructables. It’s even in a few contests there, and I’d love your vote!
Jerry Malek drove his son’s Fisker Karma to the space yesterday. It is a sweet ride! Here are a few photos to give you a taste of how the other half lives… Yes, I asked, but for some reason he wouldn’t let anyone take it apart to see how it works or see if we […]
At home, I have a small LED light that is designed for use under cabinets. I use it mostly to illuminate one side of my aquarium, and I occasionally pull it out to use it as a light for filming video.
The problem is that it is quite a bit brighter than the other LED light I have on my aquarium, and for video use, it would be nice to be able to adjust the brightness of the light as well.
However, LEDs just CAN NOT be dimmed with a regular old light switch dimmer the way an incandescent bulb can. I had heard that they can be dimmed through PWM – pulse width modulation. I was already familiar with the term, as that’s the same technique used to control the speed on the motor of my homebuilt electric car.
So, when I was in at the MILWAUKEE MAKERSPACE I asked Tom G if he had any suggestions for me to start learning electronics by building a simple PWM dimmer for my fish tank LED light. As a hobby, he has built a fair number of robots, and pointed me to the Dallas Personal Robotics Group web page, where they had a number of tutorials posted. Sure enough, they had atutorial on building a simple motor speed controller, using a 555 timer chip. It also included a very nice explanation of Pulse Width Modulation. It’s really a simple thing that is sometimes hard to describe. I don’t think I have ever heard it explained so clearly as in the DPRG tutorial.
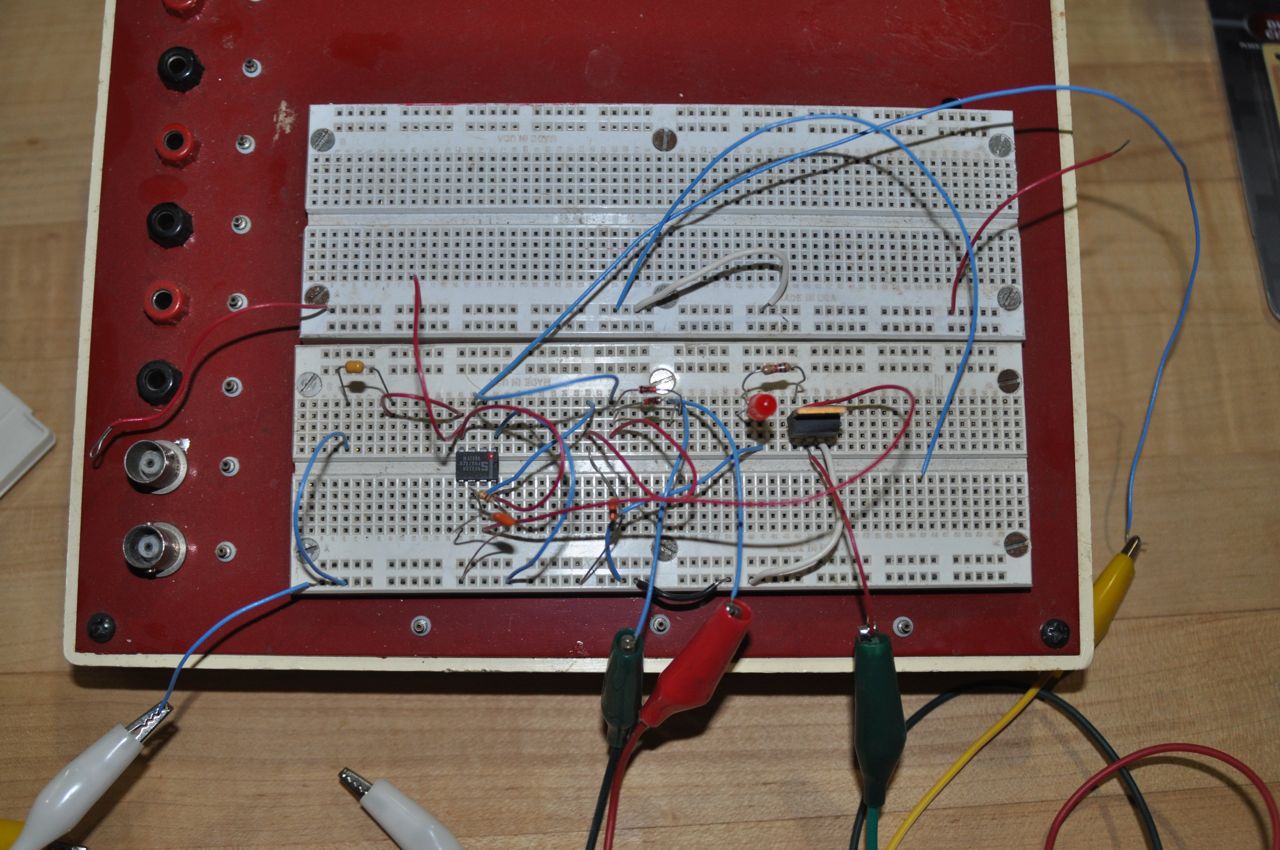
Part of the fun of the Milwaukee Makerspace is just having lots of odds and ends around handy, instead of having to take a trip out to the hardware store or electronics warehouse. A 555 timer, a few resistors and capacitors, and a bread-board were I all right there, ready for me to prototype this simple circuit. Even with nearly no electronics experience, it was pretty easy for me to follow the tutorial and connect up the 555 and other components into a working circuit.
After some playing around with it, I found that this circuit could not only control the speed of a DC motor, or dim an LED light, but somebody else suggested I hook a speaker up to it. Sure enough, I could generate various frequencies of sound as well! (Although since it’s a square-wave, none of them sounded very nice!)
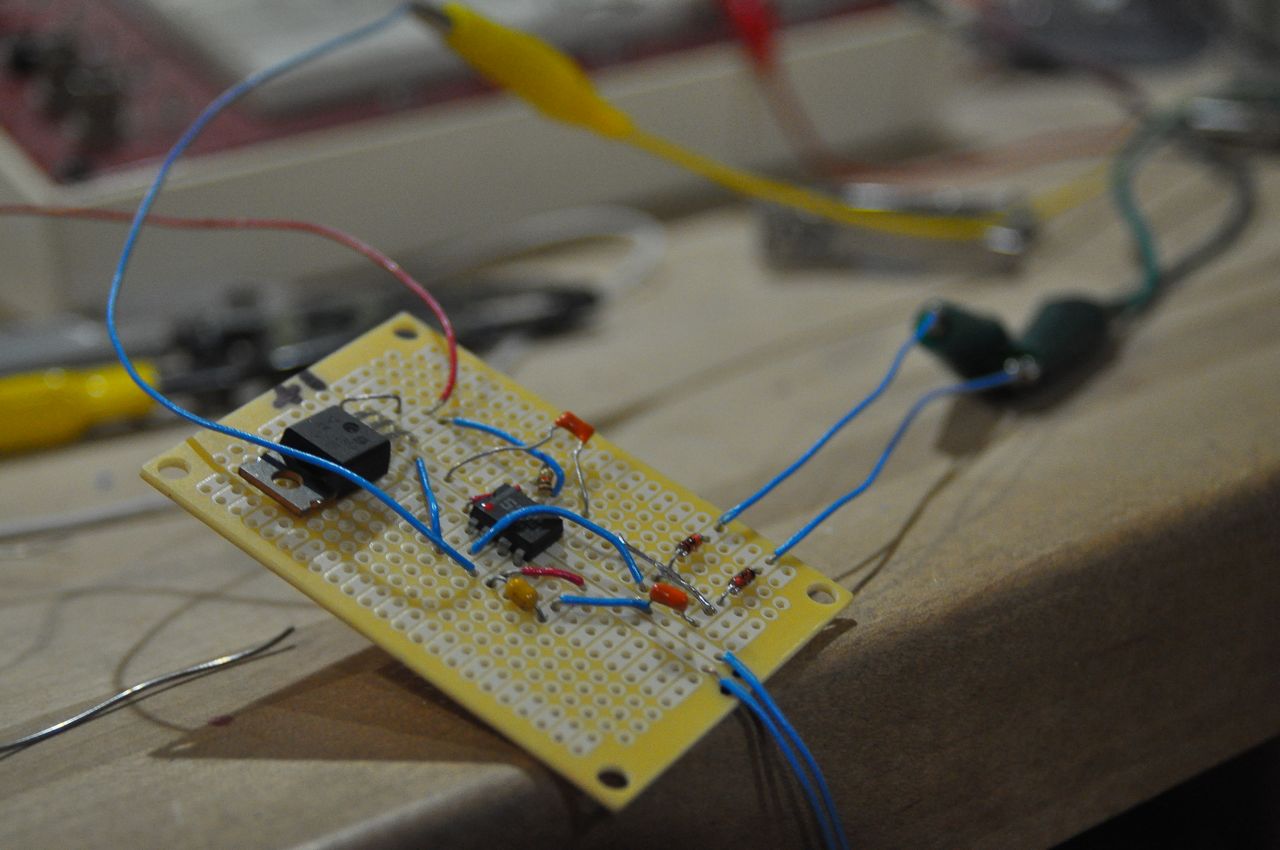
So, the next time I was going past Radio Shack, I stopped in and picked up some “Perf-Board”. It’s sort of the step between a breadboard and a custom circuit board – just a board with a bunch of holes in it, all evenly spaced, ready for you to insert electronic components and solder them together.
I then recreated my original breadboarded circuit on the perf-board and soldered it all together.
I also grabbed a used plastic case from the Makerspace parts pile to use as an enclosure for the circuit-board. A bit more scrounging meant that I had a power connector for it that matched the power supply for the LED light. I’d be able to use the same power supply whether I was using the LED with or without the dimmer.
A bit more soldering (only ONE soldering iron burn!) and installing the board in it’s case, and I now officially had a PWM Light Dimmer for my aquarium!
But here’s where it gets more interesting. I really built this not so much out of need for a dimmer, but as a learning experience to find out where theory and practice come crashing together in the real world. After assembly, I already noticed a few ways to improve the final version of the device. (I’m still thinking of this as a proto-type or first run!)
Ideas for future improvements include:
1) A power indicator light. If the PWM is turned all the way down, it’s hard to tell if the device plugged into the dimmer is even on or not.
2) A volt-meter display. It’s pretty neat to be able to see that the perceived output voltage of the dimmer is. I have several 12V devices that I would like to run from a large 14.4V battery. With a volt-meter built in, I could set the dimmer to send exactly the correct output.
3) Battery Operation. The surplus case that I used as an enclosure already has a removable cover. It shouldn’t be tough to fit some AA batteries in there to make the whole thing run without requiring a power cord to the wall.
Recently, we through a birthday party for a friend of ours. She requested a Disco Ball at the party. My sister found a disco ball at the clearance table at a store, but no matching disco ball motor.
Aha! Here’s my chance to not only save a few bucks by not PURCHASING one, but also learn about motors and gear reduction! Next time I was in at the Makerspace, I dug through the bin of scrap motors on the “Hack Rack”. An AC motor? No that’s no good, it has to run on batteries.. Stepper motor? I have no idea how to run one of those…. Hmmm. What’s this? I eventually found not one, but two motors, both connected to to some gearing and a pair of tiny square drive axles. The motors were marked as 24V DC, and I knew that if I drove them at a lower voltage, they would still work, but not spin as fast. I tested them both with a benchtop power supply and saw that they worked. The one was geared to a much faster speed than the other.
I later tried running both directly from a 9V battery, as it is the simplest power supply I could think of. The one motor, through the gear reduction, would spin the driveshaft at exactly 2 revolutions per minute at nine volts. That’s almost PERFECT disco ball rotation speed!
I bent a paper clip through a connector on the end of the drive shaft to hold the ball, and added a carbineer to hold the motor to the ceiling. POW – top-notch disco ball rotation!
For the party, I let it run on just the 9V battery. It got left on overnight, and was still running the next afternoon. What a nice, efficient motor!
But what if I wanted to spin that ball a bit faster or slower? Either motor was designed to run up to 24 volts. My PWM “dimmer” was really a motor controller anyways after all. That was all set up for 12V. I connected the dimmer to the more quickly geared motor, hung it up, and strung the disco ball from it. Sure enough, by varying the potentiometer on the dimmer, I could make the ball spin from way too slow to nausea-inducing quick!
I even noticed that at very slow speeds, the motor made a little bit of a high-pitched whine. Remember how I said an audio speaker could be hooked up to generate a tone? At slow speeds, the pulses of the motor controller can actually be heard – the frequency is within the range of human hearing. The first time I ever heard a Chevy Volt, I noticed that it made a quiet, yet distinct noise right as it accelerated away from a dead stop. That’s the sound of the car’s electric motor controller picking up frequency as the car increases speed.
So there you have it. From dimming a light, to spinning a ball, to driving an electric car, Pulse Width Modulation is a simple, yet useful, trick that’s all around us. If you would like to build your own basic light dimmer/motor controller, check out the info at: http://www.dprg.org/tutorials/2005-11a/index.html
But why stop there? Once you have some mad soldering skills, what’s to stop you from building a bigger version of a motor controller, maybe something that can push a full size car around? Check out the Open Revolt controller – a motor controller anyone is welcome to build! http://www.instructables.com/id/Homemade-100-HP-Motor-Controller-for-an-Electric-C/
If you are anything like me, you like to learn new things, and find it fascinating how various areas of industry and science are all related. It’s far more fun to build and design something yourself then it is to just purchase somebody else’s.
The Electric Motorcycle is looking pretty good! I’ve done quite a bit of work on it lately, welding up a new battery rack, painting the tank and frame, and cleaning up the wiring.
I still have to install the DC/DC converter and wire up the 12V harness.