All previous updates can be found here.
As I mentioned last week, the project to build a dynamic scuplture using 480 balls is now called Douglas. What does Douglas stand for, you ask? It is Dynamic Objects Under Gravity Linearly Accelerating in Space. It took 2 minutes to define what the acronym means – perhaps we should have taken longer. Yes, in true Milwaukee Makerspace fashion, we found an acronym first, and then found a definition for it. In addition to this huge accomplishment, we made some other progress too!
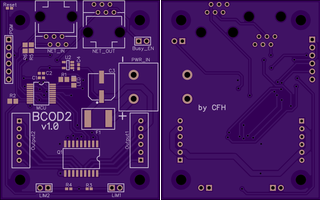
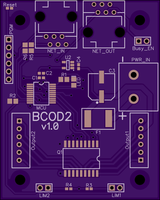
Chris sent the slave controller boards pictured below to OSHPark for fabrication. Six (6) boards were ordered as a proof of concept. They should be here by the 30th.
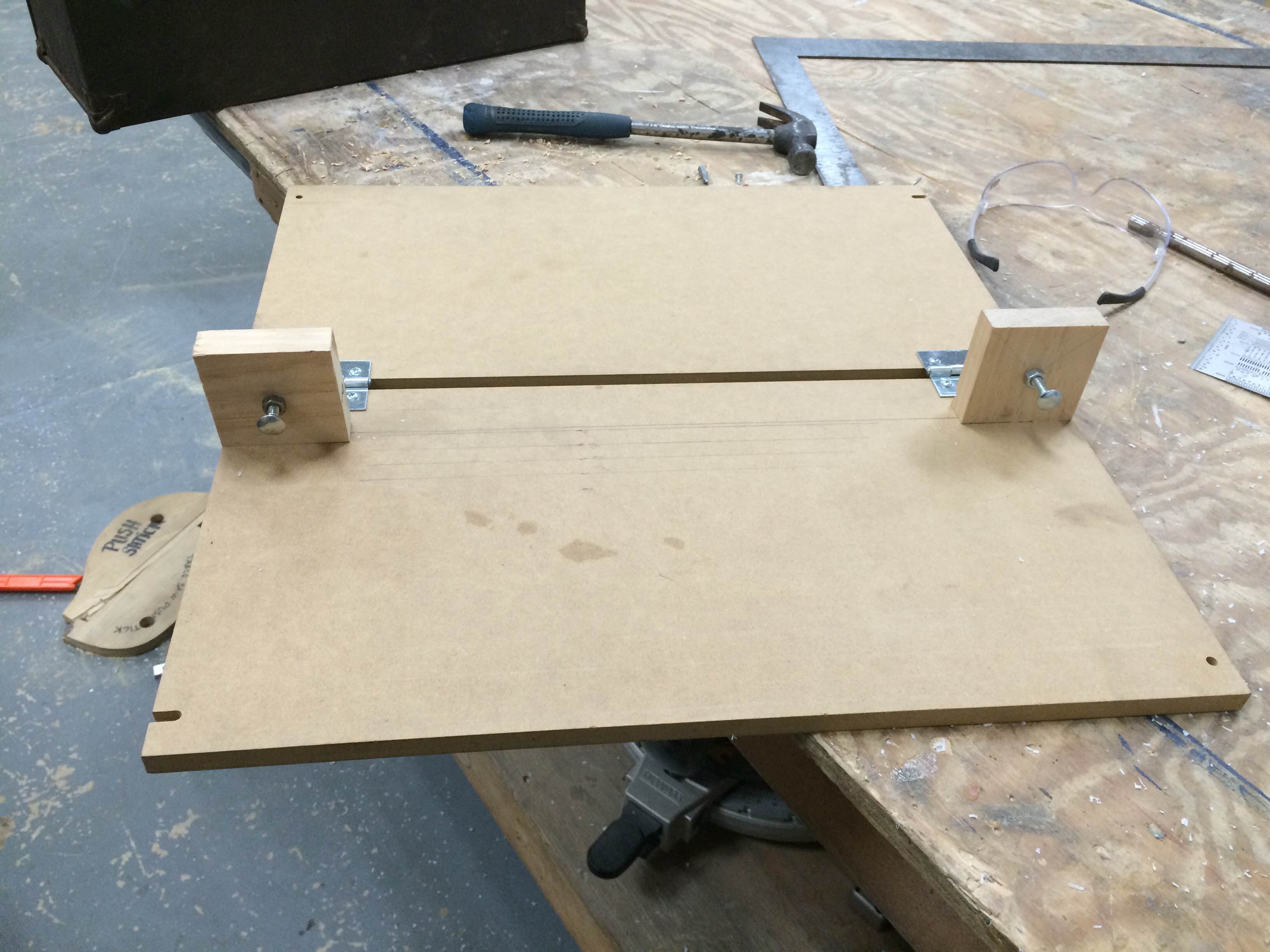
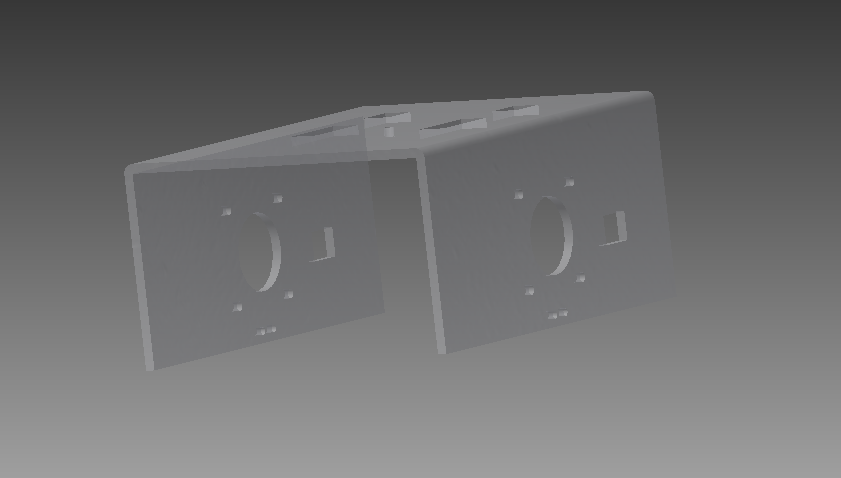
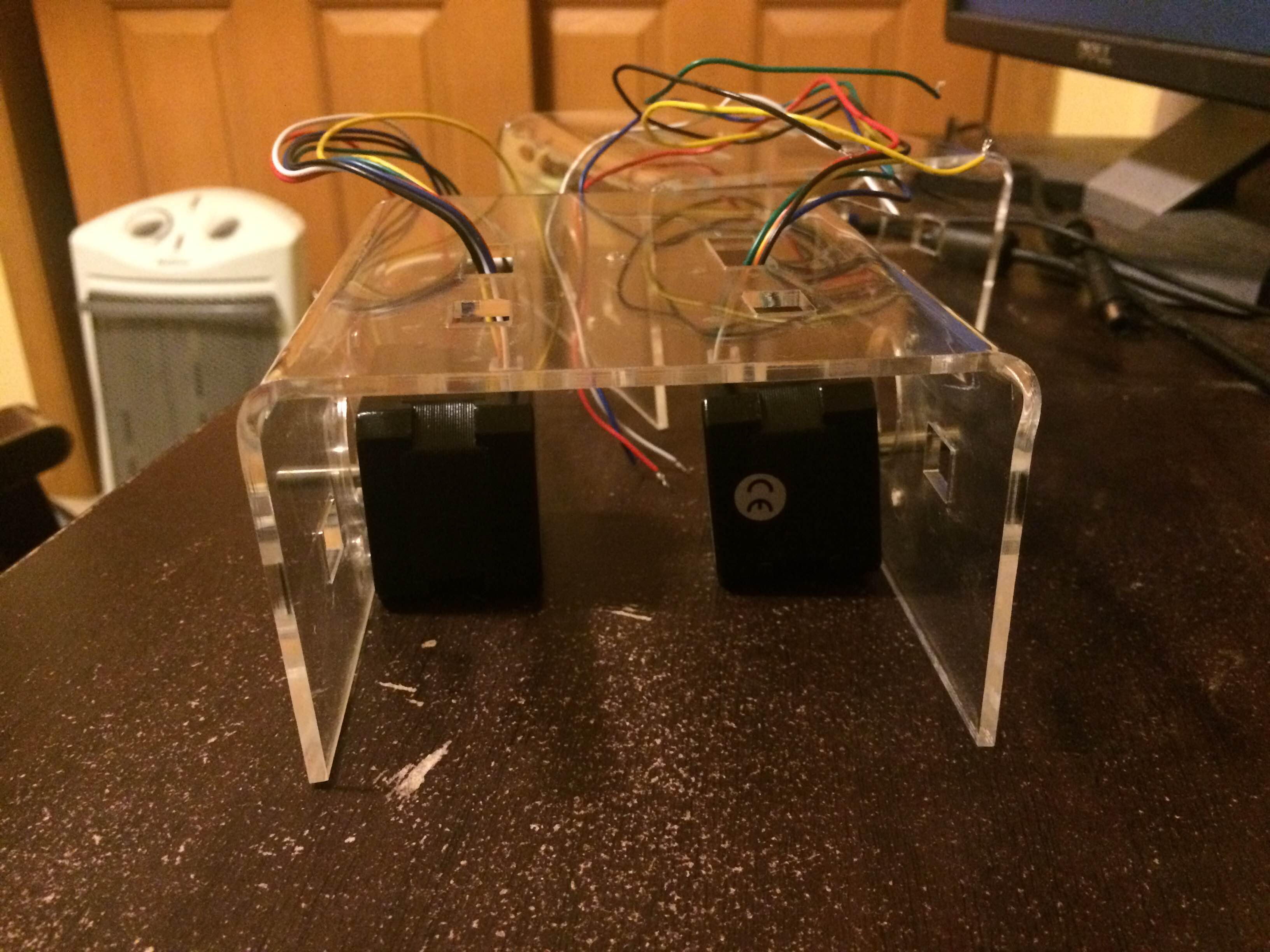
I made a bending jig to get more repeatable acrylic motor mounts pictured in the last update. It’s made out of two 1/2 inch pieces of mdf connected together with a hinge. The two adjustable screws determine the bending angle. Currently, they are set for 90 degrees. But bent acrylic usually “snaps back” as it cools, so it will have to be bent more that the desired final angle. Further experimentation will yield that angle and the adjustable screws will serve as stops for the mdf board. In the picture below, you can see parallel pencil lines indicating depth of the bent “arm” of the mount. The acrylic will butt up again a fence to be placed along one of those lines.

One of the goals of this project is to get kids interested in making by actually building parts of installation. This past Thursday, kids actually cut, stripped, and crimped connectors for RJ11 cables! These four (4) conductor “telephone” cables will be used to communicate between the control boards. I hope to have pictures of this awesome event in the next update.


{kind=link}