Over the last few weeks the Maker Faire team has been hard at work making some new signs to hang in the exhibit hall. These signs are 10 x 5 feet and will make finding your way around much easier. The logos are first traced on vinyl sheets and then carefully cut out.
After the stencils are cut they are laid out on the fabric banner for painting. It can be a challenge to get the curved lines of these very large logos to lay flat. Kim, Mike, Kathy, and Pete have been doing a great job. This project has been a labor of love for Kim who designed these signs and has seen them from drawing to fabrication.
Be sure to look for these signs and lots of others this month at the largest free Maker Faire in the US right here in Milwaukee at Wisconsin State Faire Park. For more information about Maker Faire Milwaukee and all the amazing makers that will be there click here.
Make sure not to miss this weekend’s Nerdy Derby at American Science and Surplus. Adrian and the rest of the nerdy team will be helping kids and kids at heart turn blocks of wood into rolling masterpieces of speed. If you have not been to a Nerdy Derby event this will be one not to miss. 3D printed wheels have been coming in from printers all over the city and from our Makerspace 80 at a time.
Building a car is easy and there will be a nice long track to race down once you’ve finished your creation. You start by picking a block of wood and some wheels. After a bit of nailing its off to nerdy up your car from piles of amazing decorations. Makers are encouraged to decorate, test, and re-decorate. Everything that you glue onto a car affects the way it moves down the track. See you there!
I finally got around to using Python mode for Processing 2.x. I have used pyprocessing for 1.x in the past but the current version is supported by the official IDE. While I am not very good in either, I am more comfortable with Python over Java, Processing’s default language.
I create a few simple “sketches” to get used to the format. After comparison of a few animations in both languages, Python mode was noticeably slower – around 2-3 FPS versus > 15. I worked around this issue by saving each frame as an image and combining them with GIMP to make a .GIF animation. Here are a few sketch outputs – both static and dynamic.
I have been working on a ball bearing glockenspiel. The contraption will be comprised of 3 systems – ball bearing launcher, ball bearing collection and return mechanism, and the instrument itself.
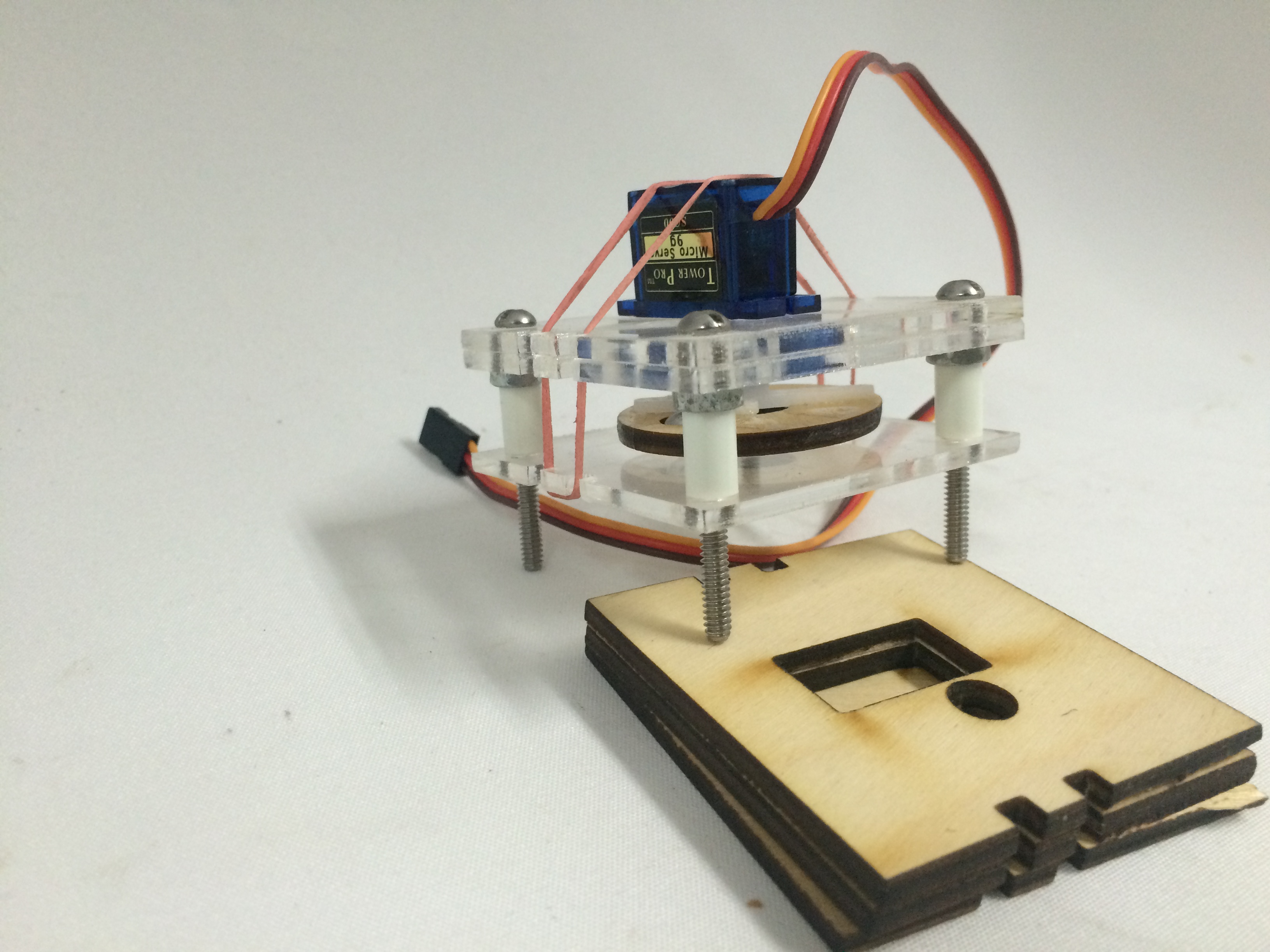
I started with the the launcher. There will be 25-30 notes and a fast and accurate launcher will be needed for each one. My design parameters were to launch 4 bearings a second within a 1/2 inch diameter over a 2 ft. drop. Here’s my first attempt.
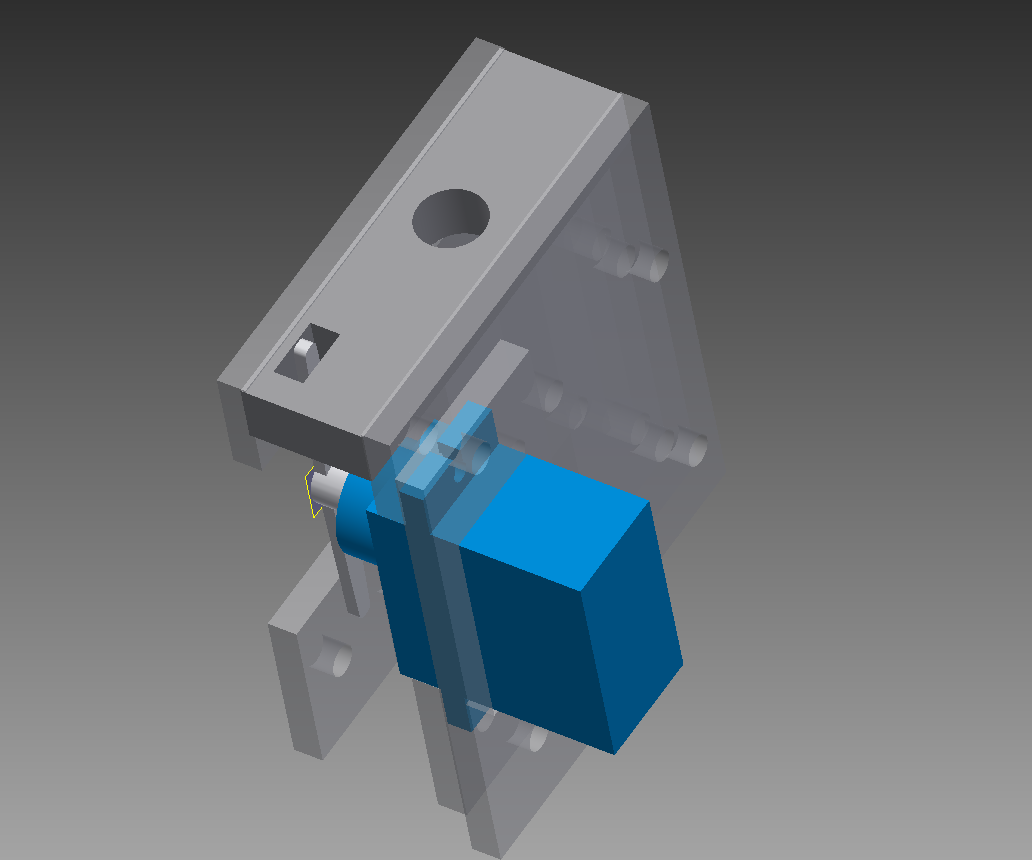
A pipe feeds ball bearings to a rotating platform with a hole just large enough for one bearing. When it’s ready to drop, the servo rotates the platform by about 30 degrees and the bearing falls out the bottom. The platform then rotates back to the home position and loads the next ball. The mechanism could definitely deliver the balls quickly but the accuracy just wasn’t there. The balls would hit the side of the hole as they were exiting. On to the next iteration…
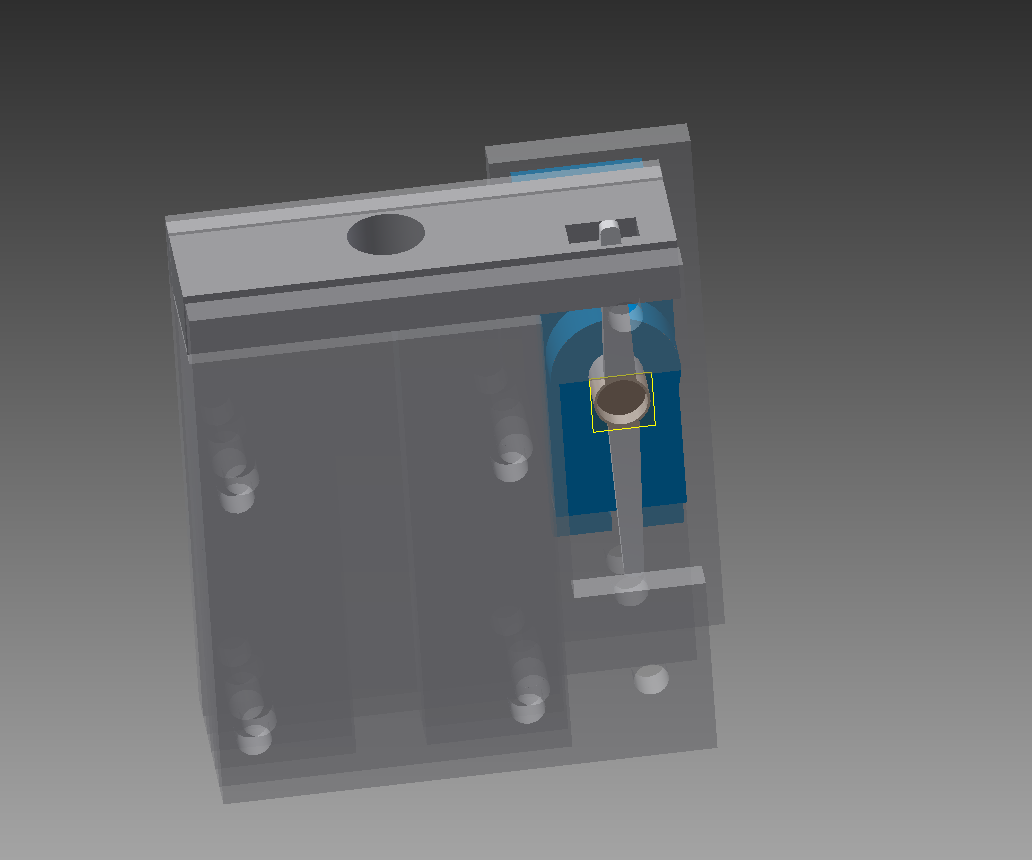
I forgot to take a picture of this one so I am posting the drawings instead. The concept is the same as the previous version, except the slider is linear instead of rotary. I added a longer channel after the initial drop to guide the ball bearings as they fall. But I had the similar accuracy issues.
So, I kept iterating the design to minimize potential disturbances after the ball is launched. And of course, decided to use magnets. The bearing are made out of steel and magnets suspend the ball till a servo controlled “plunger” launches them. This design worked beautifully! I have attached two slow motion videos below. As you can see in the second video, it’s so accurate the balls are literally hitting each other like Robin Hood “splitting an arrow”!
Next, I will work on making this design more compact and also, several ball return mechanisms.